Chasing Cerulean USBL ROV Locator Mark II – Autosync
Præcis undervandspositionering i realtid
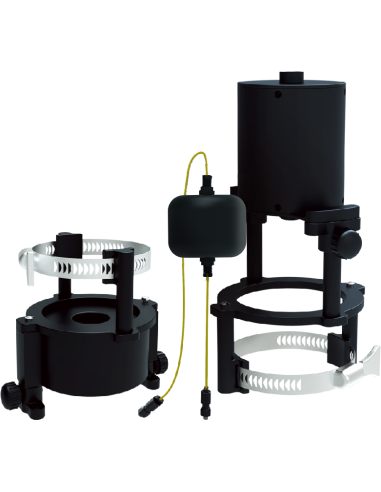
Optimer dine undervandsoperationer med næste generation af positioneringsteknologi. Chasing Cerulean USBL ROV Locator Mark II leverer præcis sporing af din ROV i realtid direkte på kortvisningen i QGroundControl. Systemet består af en kompakt sender monteret på ROV'en samt et modtagermodul på overfladen – komplet leveret med monteringsring og adapter, så du hurtigt er klar til indsats.
Med den innovative Autosync-teknologi synkroniserer modtageren og senderen automatisk med GPS/GNSS-satellitter ved missionens start (typisk inden for 30 sekunder). Satellitforbindelsen etableres i baggrunden, mens du gør ROV'en klar til søsætning, hvilket sikrer en fuldstændig problemfri arbejdsgang. For avancerede integrationer understøtter systemet desuden seriel kommunikation og API.
Vigtige operationelle retningslinjer
USBL-systemet er optimeret til maksimal synkronisering, men som med al akustisk præcisionsteknologi kan eksterne faktorer påvirke målingerne:
Nøjagtighed og rækkevidde: Ved en afstand på 50 meter mellem sender og modtager ligger den horisontale positionsafvigelse på ca. 0-8,5 meter (primært påvirket af modtagerens bevægelser i vandet). Præcisionstolerancen øges i takt med afstanden mellem enhederne.
Optimering af signalet: For at opnå den højeste praktiske nøjagtighed anbefales det at fiksere overflademodtageren stabilt, så den ikke roterer på grund af strøm og bølger. Sørg desuden for god afstand til skibssider eller bassinbølgebrydere for at minimere signalinterferens.
Bemærk: For optimal ydeevne og fejlretning (inklusive rettelser fra app-version 4.9.9) bedes du opdatere til den nyeste firmware til både app, ROV og dockingstation.
Nye funktioner og opdateringer
USBL Ruteoptagelse og Import: Optag ROV'ens præcise rute under vandet, og importér dataene til efterfølgende analyse.
Interessepunkter & Split-Screen: Markér kritiske punkter på kortet under dykket, og benyt den nye split-screen-visning til at se både video-transmission og kortposition samtidigt.
Automatisk datalagring: Målinger fra vandkvalitetssensorer gemmes nu automatisk direkte på ROV'ens hukommelseskort.
Fleksible kontrolmuligheder: Introduktion af to dedikerede ROV-styreformer samt en optimeret genvej til gribearm og vandprøvetager (kort tryk på højre skulderknap for at åbne/lukke, langt tryk for finjustering med drejehjulet).
Manuel konfiguration: Ny funktion til manuel opsætning og tilpasning af tilbehørsdokken (Accessory Dock).

























{kind=link}