Din indkøbskurv
Der er ingen varer i din indkøbskurvDroneguide til begyndere - sådan flyver du med drone
2017/09/21 Vejledninger og viden 0 Comments

Drone guide til begyndere - sådan flyver du med din drone
I denne guide og vejledning vil du lære at flyve med droner og quadkoptere
Alle går igennem forskellige kampe, når de flyver med droner og quadkoptere for første gang. Droneflyvning har generelt en meget stejl læringskurve, og man lærer noget nyt hver gang man er ude at flyve med drone.
Så hvis du har problemer med at flyve din drone, eller lige er gået i gang med droneflyvning, eller blot søger at finpudse dine færdigheder – så vil denne vejledning guide dig gnidningsfrit igennem hele flyveprocessen.
Uanset hvilken drone model du ejer, vil denne vejledning hjælpe dig med at forberede din første flyvning, flyve sikkert, blive luftbåren og lære nogle grundlæggende og avancerede drone flyvnings teknikker.
Vores mål er at give dig en vejledning, der tager alt gætteri ud af ligningen – og gennemgår en checkliste før flyvning, styringslæring, kontrollering af din drones flymønster og endda nogle avancerede flyveteknikker.
Har du endnu ikke købt en drone endnu – så se vores udvalg af droner her
Dette lærer du i denne vejledning
Vi vil i den efterfølgende vejledning, gennemgå følgende:
1. Definitioner
2. Styring af dronen
3. Fjernkontrol / sender
4. Oversigt over de primære dronedele
5. Checkliste før flyvning
6. Find et sted at træne
7. Sådan kommer du i luften med din drone
8. Svævning i luften og landing
9. Flyv din drone til højre/venstre, bagud/fremad
10. Flyv i et firkantet mønster
11. Flyv i en cirkel
12. Brug Yaw styring til at rotere din drone
13. Begynder flyveteknikker med din kameradrone
14. Avancerede flyveteknikker
15. Næste skridt
1. Definitioner
Almindelige vilkår:
Line of sight/ Sigtlinje: Piloten kan se dronen under flyvningen.
FPV (First Person View/ første personsvisning): Piloten kan se, hvor dronen flyver gennem dronens kamera. Dette kan også suppleres med såkaldte FPV briller.
1.1 Dronedele:
Fjernkontrol/ Transmitter: Den håndholdte enhed, der giver dig mulighed for at manøvrere dronen og justere indstillingerne.
Propeller: De spinder i henhold til pilotens manuelle betjening. Spindens intensitet korrelerer med intensiteten af quadcopterens bevægelse.
Kamera: Mange droner kommer enten med et kamera, eller tillader piloten at vedhæfte et kamera til dronen. Sådan udfører piloter luftotografering og cinematografi.
1.2 Kontrol & styring:
(Bemærk: For enkelhedens skyld, forudsætter denne artikel, at venstre styrepind, styrer Yaw og Throttle, og den højre pind styrer Roll/rulle og Pitch. Nogle fernkontroller, tillader piloten at skifte disse knapper ud, i relation til pilotens foretrukne styreform)
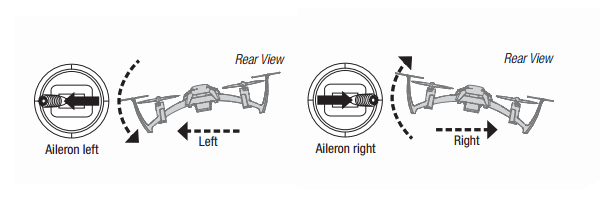
Roll: Udføres ved at skubbe styrepinden til højre, til venstre eller højre.
Pitch: Udføres ved at skubbe den højre styrepind frem eller tilbage. Dronen tilter, og manøvrerer fremad eller bagud.
Yaw: Udføres ved at skubbe venstre styrepind, enten til venstre eller til højre. Dronen drejer derefter til venstre eller højre. Fronten af dronen vil pege i forskellige retninger og hjælper med at ændre retning mens du flyver dronen.
Throttle: For at øge dronen, skub venstre styrepind fremad. For at nedjustere dronen, skal du trække den venstre styrepind baglæns. Dette justerer quadkopterens højde.
Trim: Knapper på fjernbetjeningen, der hjælper dig med at justere roll, pitch, yaw og throttle, hvis de er ude af balance.
The Rudder: Du vil som dronepilot nok høre dette begreb fra tid til anden, men det er det samme som den venstre styrepind. Det vedrører dog direkte styring af yaw (i modsætning til throttle).
Aileron: Det samme som den højre styrepind. Det vedrører dog direkte styring af roll (venstre og højre bevægelse).
The Elevator/Elevatoren: Det samme som den højre styrepind. Det vedrører dog direkte styring af Pitch (frem og tilbage bevægelse).
1.3 Manøvrering:
Bank turn: En konsistent cirkulær drejning i enten retningen med uret eller mod uret.
Hovering/Svævning: Ophold i samme position mens dronen er luftbåren. Dette udføres ved at styre throttle.
1.4 Flytilstande:
(Flytilstand kan typisk justeres med visse knapper på din fjernkontrol / sender.)
Manuel: Lignende med måden at flyve en helikopter på. Når du vipper dronen (roll), vil den ikke automatisk selvniveauere tilbage til sin oprindelige position. Selvom du slipper styrepinden og vender tilbage til midten, vil quadcopteren blive vippet.
Attitude (Auto-niveau): Når begge styrepinde er centreret, vil kopterniveauet udjævne sig selv.
GPS Hold: Returnerer dronen til sin position, når begge styrepinde er centreret. Dette er det samme som Attitudetilstand (auto-niveau), men gøres her ved hjælp af en GPS.
2. Styring af dronen
Uanset hvilken styringsform, der anvendes vil at hårdere tryk på styrepinden, skubbe dronen hurtigere i begge retninger.
Når du først starter, skal du trykke styrepindende meget forsigtigt, så dronen, udfører små bevægelser.
Når du bliver mere komfortabel med styringen, kan du udføre skarpere bevægelser.
Der findes 4 overordnede styringer:
✔ Roll/ Rulle
✔ Pitch/ Tonehøjde
✔ Yaw
✔ Throttle
2.1 Roll, Pitch, Yaw, og Throttle for Quadcopter
Nedenfor på billedet, fremgår en illustrering af roll/rulle, Pitch, Yaw og Throttle (venstre billede) og dronen (højre billede).
![]()
Roll/ Rulle
Roll flytter din drone til venstre eller højre. Det gøres ved at skubbe den højre styrepind på fjernkontrollen til venstre eller til højre.
Dette kaldes "roll", fordi det bogstaveligt talt ruller dronen eller quadkopteren.
Her vil bunden af propellerne vende mod venstre. Dette skubber luften til venstre, hvilket tvinger dronen til at flyve til højre.
Det samme sker, når du skubber styrepinden til venstre, undtagen at nu vil propellerne blot skubbe luften til højre og tvinge dronen til at flyve til venstre.
Pitch
Pitch udføres, ved at skubbe den højre styrepind på din fjernkontrol, frem eller tilbage. Dette vil vippe dronen, hvilket resulterer i en fremadrettet eller baglæns bevægelse.
Yaw
Yaw kan godt virke lidt forvirrende i starten, men man lærer det hurtigt. Det væsentlige er, at den roterer dronen med uret eller mod uret.
Dette gøres ved at skubbe venstre styrepind, til venstre eller til højre.
Se også videoen nedenfor hvordan dette gøres:
Yaw bruges typisk samtidig med throttle under kontinuerlig flyvning. Dette gør det muligt for piloten at lave cirkler og mønstre. Det giver også videografer og fotografer mulighed for at følge objekter, der kan ændre retninger.
Throttle
Throttle giver propellerne på din drone nok strøm til at blive luftbåren. Når du flyver, vil du have Throttle involveret i styringen hele tiden.
For at aktivere Throttle, så skub venstre styrepind fremad. For at trække den tilbage, træk styrepinden baglæns.
Sørg for ikke at tilbagetrække dronen helt, indtil du er nogle centimeter væk fra jorden. Ellers kan du beskadige dronen, og din træning bliver kortvarig.
3. Fjernkontrol / sender
En fjernkontrol er en håndholdt controller, der lader dig styre din drone eller quadcopter, samt styre dronens flyvemønster. Når du foretager en justering med styrepindende, sender den et signal til din drone og fortæller, hvad den skal gøre næste gang.
Se billedet nedenfor, som illustrerer hver del af fjernkontrollen:
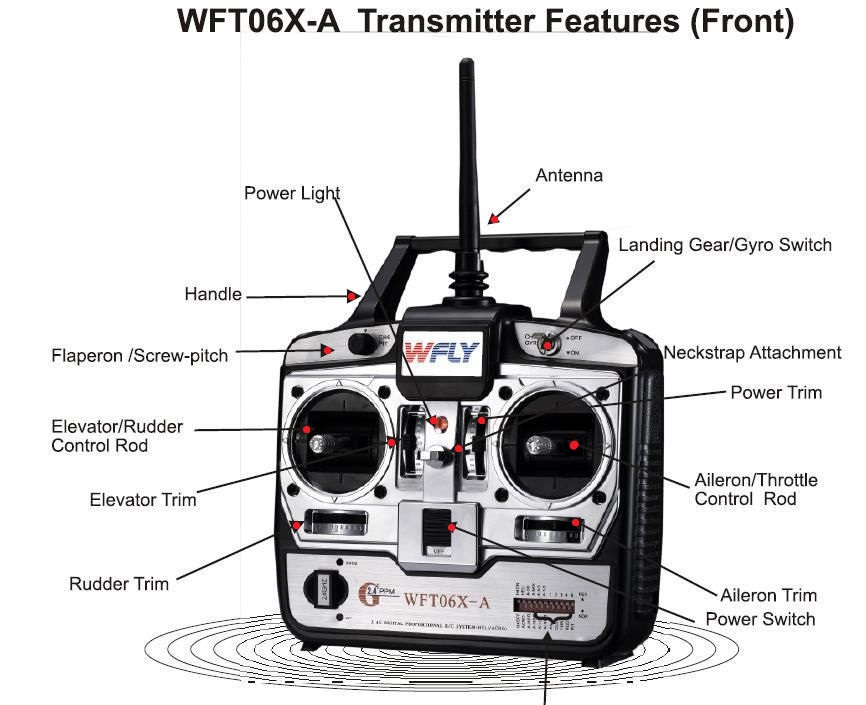
Fjernkontroller, kommer i forskellige former og størrelser. De har også forskellige funktioner. Dog er der er visse dele, der er universelle for hver fjernkontrol.
Højre styrepind
Den højre styrepind styrer Roll/rulle og Pitch.
Med andre ord flytter den din drone til venstre / højre og baglæns / fremad.
Venstre styrepind
Den venstre styrepind styrer Yaw og Throttle.
Med andre ord roterer den din drone med uret eller mod uret, og den justerer dens højde, som du flyver
Trim knapper
Hver fjernkontrol, har sin egen trimknap, som du kan se på billedet nedenfor:
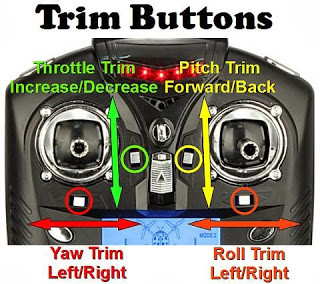
Når du først skubber din Throttle for at få din qdrone fra jorden, vil du bemærke, at dronen automatisk tiltes og flyver i en retning (eller flere).
Dette sker, når styringen er ubalanceret. For at afbalancere dem skal visse fjernkontroller, være trimmet.
Tjek begyndelsen af denne video, hvor piloten trimmer et par af sine kontroller:
4. Oversigt over de primære dronedele
Når du lærer at flyve en drone, er det vigtigt at forstå den maskine man styrer.
Hvis noget går galt, vil du være i stand til at diagnostificere og løse problemet.
Her er de vigtigste dele af en drone:
✔ Rammen
✔ Motoren
✔ Elektronisk hastighedsregulering (ESC)
✔ Flight Control Board
✔ Radiosender og modtager
✔ Propeller
✔ Batteri og oplader
Rammen, forbinder alle de øvrige komponenter. For en quadcopter er den formet i enten en X eller a + form.
Hvis du bygger din egen quadcopter, burde du overveje størrelsen og vægten af rammen, og hvordan den vil påvirke din flyveoplevelse.
Motoren drejer propellerne. En quadkopter har brug for fire motorer, fordi en motor driver en enkelt propel.
Jo højere kV, jo hurtigere vil motoren dreje. Kv er ofte citeret i omdrejningstal pr. Volt, hvilket betyder at en 1000 Kv motor på en 10V forsyning, vil rotere lige under 10.000 omdr./min.
Elektriske hastighedsregulatorer (ESC'er), er kablede komponenter, som forbinder motorerne og batteriet. De relæer et signal til motorerne, der fortæller dem, hvor hurtigt de skal spinde.
På ethvert tidspunkt kan hver af dine motorer spinde ved forskellige hastigheder. Dette giver dig mulighed for at manøvrere og ændre retning. Denne process udføres af Electronic Speed Controls, så de er meget vigtige.
Flight Control Board, er din "operatørchef". Det styrer accelerometer og gyroskoper, som styrer hvor hurtigt hver motor drejer.
Radiosenderen, er din fjernbetjening, og modtageren er antennen på dronen, der taler til fjernkontrollen. Når du foretager en justering på senderen, er det modtageren der forstår kommandoen, og sender den til resten af drone/quadkopter-systemet.
En quadcopter har 4 propeller, og hver enkelt, hjælper med at bestemme hvilken retning dronen flyver.
Batteriet er strømkilden til hele dronen. Dette skal oplades og genoplades, for uden batteri kan du ikke flyve din drone.
Opladeren oplader dit batteri, så du kan tage flere flyvninger.
(Pro tip: Vi anbefaler at købe flere batterier. Derfor behøver du ikke vente på, at det første batteri oplades for foretage flere flyvninger. Du kan oplade det første batteri, mens du indsætter den anden, tredje, fjerde, osv.) .
5. Checkliste før flyvning
Vi anbefaler at man gennemgår denne checkliste før din flyvning med drone. Checklisten holder både dig og din drone sikker.
Check altid følgende ting før flyvning med drone eller quadkopter:
✔ Hvis du har et kamera, så kontrollér, at du har dit micro SD-kort indsat.
✔ Sørg for, at fjernkontrol-erbatteriet er opladet.
✔ Sørg for, at drone-batteriet er opladet.
✔ Indsæt batteriet.
✔ Sørg for, at batteriet er sat korrekt i.
✔ Sørg for, at hver propel er sikker.
✔ Kontrollér, at der ikke er løse dele på dronen.
✔ Kontroller for manglende eller løse skruer.
✔ Tænd fjernkontrollen.
✔ Hvis din copter skal kalibrere og få satellitlås, vent indtil den er færdig.
✔ Sørg for, at der er nok plads til afgang og flyvning.
✔ Sørg for, at Throttle (venstre styrepind) er helt nede.
✔ Tænd senderen.
✔ Gå 3 eller 4 trin tilbage (eller i en sikker afstand).
✔ Hold øje med dronen hele tiden.
✔ Hold altid et direkte synsfelt, når du flyver, så du kan altid se din drone.
6. Find et område for at træne
En del områder i Danmark, bærer kategorien "No-drone zoner", og i disse zoner er flyvning med droner ikke tilladt. No-drone zonerne fremgår altid af seneste bekendtgørelse om droneflyvning. En nemmere måde er nedenstående virtuelle opdaterede kort over flyzonerne i Danmark. Det kan tage et par minutter at hente det seneste nye og opdaterede kort. Tryk på kortet nedenfor og for at se det opdaterede kort loade.

7. Sådan kommer du i luften med din drone
Nu hvor du forstår styringen, og du har foretaget alle de rigtige sikkerhedsforanstaltninger, er du nu klar til at flyve med din drone eller quadkopter.
For at få din drone i luften, er den eneste styring, du har brug for, Throttle funktionen.
Skub Throttle (venstre styrepind) op meget langsomt, bare for at få propellerne til at komme i gang. Stop derefter.
Gentag dette flere gange, indtil du er komfortabel med følsomheden.
Skub Throttle langsomt længere end før, indtil dronen løfter sig fra jorden og flyver væk. Træk derefter Throttle ned til nul, og lad dronen lande.
Se også nedenstående video, hvordan man kommer i luften med sin drone:
Gentag denne process 3-5 gange. Læg mærke til, om dronen forsøger at dreje til venstre eller højre (Yaw), flytte til venstre eller højre (Roll), eller bevæge sig baglæns eller fremad (Pitch).
Hvis du bemærker nogen bevægelser der sker uden at du får dem til at ske, skal du bruge den tilsvarende trimknap til at afbalancere dem.
For eksempel, hvis du bemærker at dronen bevæger sig til venstre, når du trykker på Throttle, skal du justere "roll" trimknappen ved siden af højre styrepind.
Fortsæt med at justere trimmerne, indtil du får en forholdsvis stabil svingning fra jorden ved kun at bruge Throttle.
Tillykke! Du ved nu, hvordan du får din drone luftbåren.
8. Svævning i luften og landing
For at blive luftbåren, skal du først bruge Throttle. Du foretager derefter blot små justeringer med den højre styrepind for at holde dronen svævende på sin plads.
Det kan også være nødvendigt, at justere den venstre styrepind (Yaw) lidt for at forhindre dronen i at dreje.
Brug Throttle til at få dronen om et pænt stykke op fra overfladen.
Lav små justeringer med den højre styrepind (og venstre, hvis det er nødvendigt), for at holde dronen svævende på sin plads.
Når du er klar til at lande, skal du sænke Throttle langsomt.
Når dronen er en tomme eller to fra jordoverfladen, skal lade Throttle falde helt, og lade dronen falde til jorden stille og roligt.
Gentag dette, indtil du får det behageligt med at svæve væk fra jorden og lande dronen forsigtigt igen
9. Flyv din drone til venstre / højre og fremad / bagud
For at flyve din drone til venstre, højre, fremad og baglæns skal du holde Throttle med jævne mellemrum for at holde dronen luftbåren. Du vil så bruge den højre styrepind, til at manøvrere quadkopteren i den retning, du vil have den til at flyve.
Start med at få dronen til at svæve fast over jordoverfladen ved at anvende Throttle.
Skub den højre styrepind fremad for at flyve dronen lidt fremad.
Træk højre styrepind tilbage, for at bringe dronen tilbage til sin oprindelige position.
Flyv nu dronen længere bagud et par meter, og returnér den til sin oprindelige position.
Skub den højre styrepind til venstre for at flytte din drone et par meter til venstre.
Flyv dronen tilbage til sin oprindelige position, og flyv den derefter et par meter til højre.
Hvis dronen begynder at rotere (Yaw), skal du justere den venstre styrepind til venstre eller højre for at holde dronen vendt i samme retning.
(Pro tip: Når du bevæger dig i begge retninger, vil du sandsynligvis mærke, at dronen falder i højden. For at holde quadkopteren i samme højde, tryk på Throttle og giv den mere strøm, når du vender eller bevæger dig.)
10. Flyv i et firkantet mønster
Du er nu luftbåren og kommet væk fra jorden, og du ved, hvordan du flyver en quadcopter i de fire grundlæggende retninger.
Nu er det tid til at kombinere disse færdigheder, og begynde at flyve i mønstre. Dette vil hjælpe dig med at få en fornemmelse for samtidig at engagere alle styringsformerne.
For at flyve i et firkantet mønster, hold dronen vendt væk fra dig hele tiden.
Skub den højre styrepind fremad (stigning) og flyv et par meter frem. Derefter returnerer du den højre pind til midten og dronen svæver på plads.
Skub derefter højre styrepind til højre (Roll/rulle) og flyv til højre et par meter. Derefter svæv dronen på plads i nogle få sekunder.
Træk højre styrepind baglæns og flyv bagud et par meter. Derefter, svæv på plads i et par sekunder, og skub den højre styrepind til venstre og returnér dronen til sin oprindelige position.
Du har lige fløjet i en firkant! Fortsæt med at gøre dette, indtil du bliver komfortabel med hele processen, og fortsæt til vores næste mønster – at flyve i en cirkel.
11. Flyv i en cirkel
Det er her, du vil finpudse dine samultane styringsfærdigheder med din drone.
For at flyve en drone i en cirkel, vil du skulle bruge Throttle, Roll og Pitch, på samme tid.
Som sædvanlig, brug Throttle til at komme i luften. Derefter afgør, om du vil flyve med uret eller mod uret.
I dette eksempel antager vi, at du flyver med uret (til højre).
Hold dronen vendt væk fra dig, og skub højre styrepind diagonalt op og til højre. Dette vil involvere både Picth og Roll på samme tid, og begynde at flyve dronen i en cirkel til højre.
Efter et par meter skal du begynde at dreje til højre, mere til højre, så du får mere roll. Dette vil starte manøvrering af din drone til højre.
Efter nogle få meter, skal du begynde at dreje højre styrepind diagonalt til bunden til højre og fortsætte med at cirkulere den højre pind, indtil dronen, vender tilbage til sin oprindelige position.
Prøv at ændre retninger og langsomt dreje den højre styrepind til at flyve i en cirkel. Hvis du bemærker, at dronen begynder at rotere og flyver i forskellige retninger, skal du justere quadcopterens Yaw, ved at skubbe venstre styrepind til venstre eller højre.
12. Brug Yaw styring til at rotere din drone
For at rotere din drone, skal du bruge Throttle til først at komme i luften.
Når du er på en behagelig svævningsafstand, skal du trykke den venstre styrepind i begge retninger. Dette vil rotere quadcopteren på plads.
Drej dronen 360 grader. Skub derefter den venstre styrepind i den modsatte retning og drej dronen 360 grader til den anden side.
Fortsæt med at gøre dette, indtil du er komfortabel med hele øvelsen.
13. Begynder flyvetekniker med din kameradrone
Her er nogle begynderflyvningsteknikker for dig at beherske:
✔ Svæv på plads.
✔ Svæv og drej dronen.
✔ Drej dronen i forskellige vinkler, og fly den til venstre / højre og fremad / bagud, indtil du er komfortabel med at flyve en quadcopter uden at den vender i samme retning som dig.
✔ Flyv din drone i et firkantet mønster.
✔ Flyv din drone i en cirkel.
✔ Flyv i forskellige højder.
✔ Vælg to mål på jorden, og gentag flere gange landing, flyvning og landing på hver enkelt mål.
Se også videoen nedenfor som viser denne øvelse:
14. Avancerede flyveteknikker
Her er nogle avancerede flyveteknikker, du kan prøve at udforske og beherske:
✔ Flyv i et "8-tals" mønster. Dette kræver, at du flyver dronen med forsiden vendt fremad hele tiden.
✔ Bank turns/vendinger. Hold lidt Pitch lidt fremad for fremadgående bevægelse. Påfør Throttle, og rul quadcopteren i retning af svinget (venstre eller højre).
Se også nedenstående video som et eksempel på bank turns/vendinger:
15. Næste skridt
Tillykke med at færdiggøre vores "Droneguide for begyndere – sådan kommer du i gang med at flyve med drone" drone pilot træningsvejledning! Vi håber det får dig på vej til at flyve din drone som en professionel dronepilot.
Hvis du ikke allerede har købt en drone eller en quadkopter endnu, så se vores store udvalg af droner ved at klikke på linket nedenfor:
Hvilken drone anbefales i til begyndere?
Afhængig af dit budget og krav til kamera, tilbyder vi en række af de bedste droner i hver deres respektive prisklasser lige fra 449 kr. og op til 200-300.000 kr. Vi har derfor lavet en guide til de bedste droner i hver deres prisklasser her:
Se vores store guide til de bedste droner her
Objektiv og upartisk kunde rådgivning

Med over 200 forskellige droner og robotter i vores online produktkatalog, med produkter fra markedets bedste producenter, sætter vi altid en stor lid i at give dig en objektiv og upartisk kunderådgivning, når det kommer til rådgivning omkring dit valg af drone producent og model.
Vi sætter altid kundens behov i centrum, og da disse altid er forskellige fra person til person, kan vi med et bredt sortiment, der spænder lige fra professionelle droner til cinematografi og til undervands droner til eks. fiskeri, skræddersy den helt rigtige drone løsning ud fra dine specifikke behov, krav og budget.
Er du stadig i tvivl om dit drone valg, så kontakt vores kundeservice på telefon, online chat eller på info@droneland.dk.
Related Posts:
-

Autel EVO 2 video manualer, vejledninger & support
04 04 2020 -

Sammenlign de bedste droner under 7.000 kr. - DJI Mavic Air 2 vs Hubsan Zino 2 vs Parrot Anafi
03 03 2020 -

Drone konkurrence - Vind en JJRC H73 GPS mini drone med 2K kamera
28 02 2020 -

Q&A: Spørgsmål & Svar til JJRC X12 Aurora drone
16 02 2020 -

De bedste drone lanceringer i 2020
15 02 2020
















